




El actuador lineal de riel PA-18 es nuestro actuador de longitud fija más grande y se usa comúnmente en gabinetes personalizados, automatización del hogar y robótica. Como muchos de nuestros actuadores, se puede controlar mediante nuestra selección de placas de control Arduino . Este artículo mostrará cómo puede controlar el PA-18 con una configuración sencilla que puede adaptarse fácilmente para adaptarse a su aplicación.
Equipo
- 1x actuador lineal de pista PA-18
- 1x Arduino Uno
- 1x puente H MegaMoto Plus
- 1 fuente de alimentación de 12 VCC
- 2x pulsadores momentáneos
- Cables de puente
Software
- IDE de Arduino
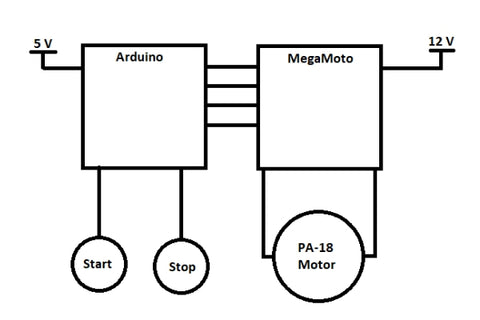
Conexiones del sistema
El actuador utilizado en esta configuración requiere un voltaje de entrada de 12 VCC y hasta 8 A de corriente a plena carga, estos valores son mucho más altos de lo que un microcontrolador Arduino es capaz de suministrar. Para no dañar el Arduino se utiliza el puente H MegaMoto Plus. El puente H puede manejar los requisitos de energía de los actuadores y puede controlarse fácilmente mediante Arduino.
Para este sistema existen conexiones desde el Arduino al puente H MegaMoto Plus, y a los dos pulsadores. Cada botón requiere una única entrada, estas se eligen entre los pines GPIO disponibles de Arduino. El puente H tiene cuatro conexiones al Arduino, tres salidas y una entrada. Los pines utilizados por el puente H están preestablecidos y no se pueden cambiar.
Diagrama de bloques
Comandos Arduino
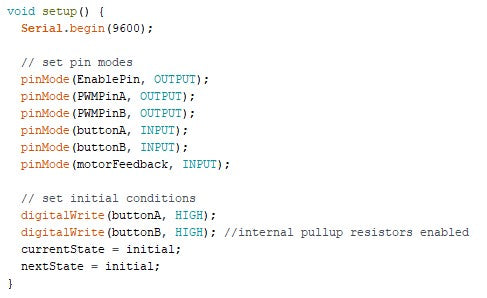
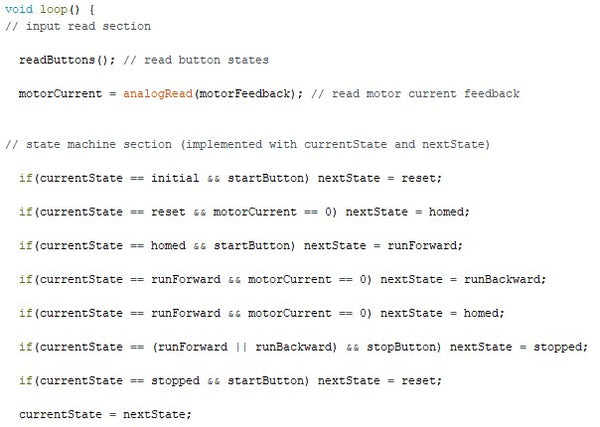
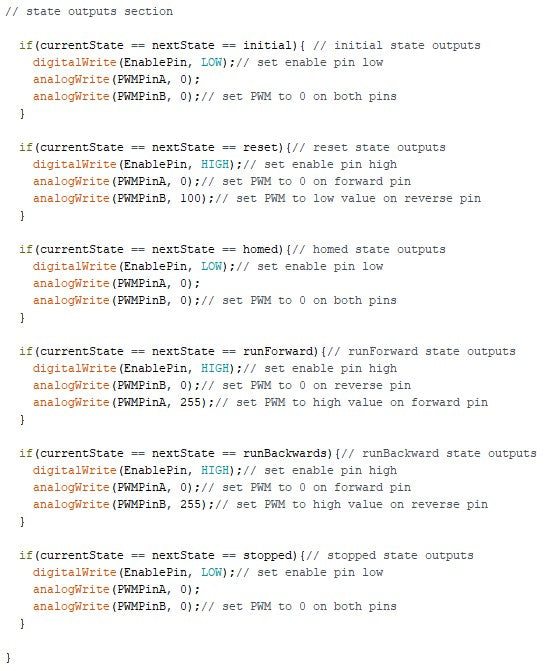
Al conectarse a un Arduino, los pines utilizados deben configurarse al principio del código. El comando pinMode se utiliza para definir los pines como entradas o salidas. Para cambiar la señal que envía Arduino a un pin específico, se utilizan los comandos digitalWrite y analogWrite. Además, los comandos digitalRead y analogRead se utilizan cuando Arduino necesita verificar la señal en un pin específico. En el siguiente programa, el comando digitalWrite se usa para habilitar o deshabilitar el puente H y para configurar los pines utilizados para los botones. El comando analogWrite se utiliza para establecer el valor de la señal PWM en el rango de 0 a 255 para el puente H. El comando digitalRead se utiliza para comprobar si los botones han sido presionados o soltados. AnalogRead se usa para medir el consumo de corriente del motor del actuador, esto se usa para verificar cuando el actuador está al final de su carrera.
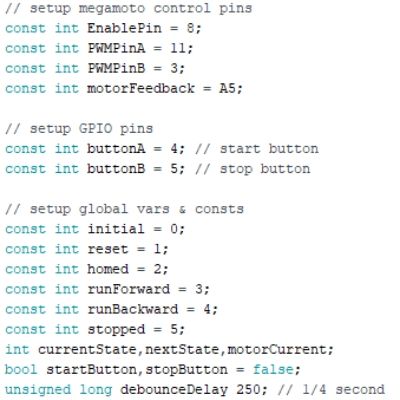
Código Arduino
Definiciones de programas
Configuración del programa
Bucle principal
Lectura del pulsador

La funcionalidad de este sistema va más allá de lo que se muestra en este artículo; el microcontrolador Arduino y el puente H MegaMoto Plus se pueden utilizar para implementar rutinas de control mucho más complicadas. Esta configuración es capaz de controlar la velocidad variable utilizando el comando analogWrite para configurar la señal PWM. La corriente del motor del actuador podría monitorearse para usarse en la detección de carga para activar comandos adicionales.
Para obtener información adicional, envíenos un correo electrónico a sales@progressiveautomations.com o llámenos al 1-800-676-6123.