




Los motores de CC se utilizan ampliamente tanto en aplicaciones industriales como en el hogar para proyectos personales. Una de las consideraciones clave al elegir utilizar un motor de CC es si se debe conectar algún tipo de retroalimentación al motor.
¿Qué es la retroalimentación?
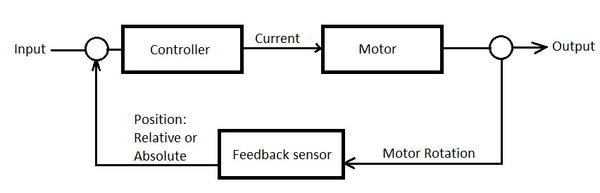
La retroalimentación se refiere a cualquier información que un controlador puede utilizar para monitorear un proceso. En los motores de CC, la retroalimentación generalmente se recopila en forma de posición, número de rotaciones y dirección de rotación. Esta información luego se puede pasar al controlador para medir la velocidad angular y la posición del eje del motor, esto se conoce comúnmente como una forma de "control de circuito cerrado".
En casos de uso más sofisticados, la retroalimentación del motor y otras fuentes se puede controlar para lograr no solo una velocidad y posición precisas, sino también la respuesta dinámica, sincronización y estabilidad deseadas.
Beneficios de utilizar la retroalimentación
Cuando se implementa correctamente, la retroalimentación puede permitir que la maquinaria funcione de manera más eficiente y con mayor repetibilidad. La retroalimentación podría permitir que su mecanismo ajuste automáticamente la salida para mantener la estabilidad, reducir las variaciones y minimizar los errores sin necesidad de participación humana.
Un ejemplo sencillo de un buen sistema de control de retroalimentación es el termostato. El controlador mide la temperatura en la habitación y ajusta la salida de los elementos calefactores para mantener una temperatura establecida.
Una de las ventajas clave de la retroalimentación cuando se trata de motores de CC es el control PID. PID se refiere a un mecanismo de bucle de control ampliamente utilizado en la industria para compensar automáticamente errores en la velocidad o posición de la máquina.
Los comentarios también se pueden utilizar para implementar mecanismos a prueba de fallos y solucionar problemas de su aplicación. Por ejemplo, si se supone que sus actuadores lineales se mueven sincronizados pero uno está retrasado, algo anda mal. Luego, el sistema puede detener el movimiento de ambos actuadores para evitar daños o inclinación.
Tipos de sensores de retroalimentación para motores DC
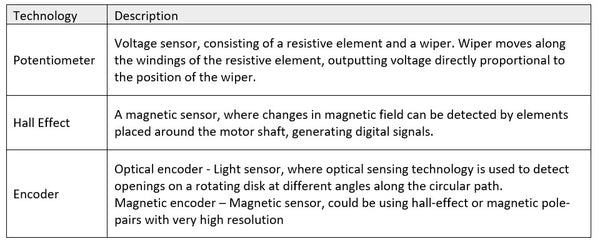
Los tipos más comunes de retroalimentación para motores de CC son potenciómetros, sensores de efecto Hall y codificadores. En lo que respecta a precisión y exactitud, los 3 tipos pueden ser comparables y son muy eficaces con la tecnología moderna. Las diferencias surgen al considerar requisitos de rendimiento específicos, como durabilidad, factores ambientales, interferencias electromagnéticas y rendimiento de temperatura.
Potenciómetro
La mayor ventaja de este tipo de retroalimentación es su simplicidad. El potenciómetro convierte efectivamente un motor CC normal en un servomotor, lo que permite un movimiento preciso y/o control de velocidad. Los potenciómetros proporcionan información directa sobre la posición angular del eje del motor. Como resultado, cuando el sistema pierde energía, el potenciómetro puede retener su información de posición sin necesidad de regresar a casa. Además, debido a que los potenciómetros en el núcleo son simplemente divisores de voltaje con una resistencia grande, son buenos para lidiar con interferencias electromagnéticas (EMI).
También existen inconvenientes que conlleva el uso de potenciómetros. Los sensores potenciómetros requieren contacto para realizar las mediciones, lo que significa que serían menos duraderos y tendrían una vida útil limitada en comparación con otras formas de retroalimentación. Los potenciómetros son una forma de medición relativamente lenta, tanto por la necesidad de contacto como porque pueden necesitar un convertidor analógico a digital antes de que se establezca el control de retroalimentación real. Finalmente, los potenciómetros en los motores crean una limitación en el número de rotaciones que puede realizar un eje. Las aplicaciones con retroalimentación de potenciómetros deberían asegurarse de que haya una manera de evitar el desplazamiento manifiesto.
Efecto Hall
Los sensores de efecto Hall son un elemento básico de la retroalimentación de motores porque son confiables, precisos y tienen una larga vida útil. A diferencia del potenciómetro, los sensores de efecto Hall no necesitan hacer ningún contacto, por lo que son útiles en entornos hostiles, altamente resistentes al desgaste y confiables en entornos con alto impacto. Los sensores de efecto Hall proporcionan pulsos eléctricos cuando el imán está alineado con los componentes electrónicos de detección. Por este motivo, son adecuados para aplicaciones de alta velocidad y permiten preprogramar ciertos ángulos del eje del motor.
Una de las desventajas de los sensores de efecto Hall es que sólo pueden proporcionar información de posición relativa. Esto significa que cada vez que el sistema pierde energía, los sensores de efecto Hall tendrían que moverse a una ubicación conocida y reiniciarse. Además, los cables de los sensores de efecto Hall que transportan información podrían ser vulnerables a interferencias electromagnéticas y ruido. Por esta razón, a veces las señales pueden perderse o generarse señales falsas, lo que significa que la información de posición puede "desviarse" con el tiempo.
Codificador
Hay codificadores ópticos y magnéticos. Los codificadores magnéticos son probablemente el mejor sensor general para generar señales de retroalimentación . Son sin contacto, al igual que los sensores de Efecto Hall, lo que significa que tienen una vida útil muy alta. Son muy rápidos y normalmente tienen una resolución muy alta. Los codificadores magnéticos tampoco se ven afectados por el polvo u otras partículas y pueden usarse en una variedad de entornos.
Los codificadores suelen ser costosos y requieren componentes electrónicos dedicados que pueden ser difíciles de configurar y controlar. Agregar complejidad innecesaria al diseño no siempre es una buena idea porque también aumentaría la cantidad de posibles modos de falla.
Hay una variedad de formas de retroalimentación disponibles para los diseñadores y, con los avances en la tecnología moderna, se pueden hacer más o menos equivalentes en términos de precisión. Al elegir el tipo de retroalimentación, se deben considerar las necesidades de rendimiento de su aplicación y comprender los beneficios de las tecnologías con las que están trabajando.