




Un actuador lineal es un componente electromecánico común que se utiliza en muchas aplicaciones. La unidad es altamentepersonalizable y se puede modificar para adaptarse a diferentes entornos y satisfacer diversas demandas funcionales. Para utilizar la función de retroalimentación posicional de los actuadores lineales, hay muchos sensores disponibles para esta función. En este artículo, analizaremos cómo funciona la retroalimentación del interruptor de límite en los actuadores.
Final de carrera en actuadores lineales
Primero, veremos cómo funciona el interruptor de límite dentro de un actuador lineal. Un interruptor de límite es un componente que se encarga de garantizar que el dispositivo no se extienda ni se retraiga fuera de su dimensión mecánica. Un actuador lineal eléctrico se mueve a medida que gira el motor, lo que acciona el tornillo acme para empujar la varilla del eje hacia afuera o hacia adentro. La dirección del giro del motor determina la dirección del movimiento de la varilla del eje. Sin embargo, por sí solo, no hay paradas en ninguno de los extremos del viaje. El motor solo se detendrá cuando el usuario apague manualmente la alimentación de la unidad. Esto puede causar un problema de seguridad si el actuador se desplazó hasta su limitación mecánica pero el motor aún está funcionando, la unidad provocará que el motor se cale. Esto provocará un alto consumo de corriente y eventualmente quemará el motor. Para evitar esto, se instala un conjunto de finales de carrera en todos los actuadores de Progressive Automations . El interruptor de límite implementa un disparador mecánico en cada extremo del recorrido, y el disparador hace que el motor se apague y luego finalice el recorrido.
Retroalimentación de interruptor de límite en actuadores lineales
La aplicación de algunos usuarios necesita las señales de retroalimentación del interruptor de límite para controlar su sistema. En lugar de utilizar el disparador mecánico para apagar el motor, la aplicación prefiere tener una señal analógica como parte de un sistema de control integrado. Actualmente, las Automatizaciones Progresivas ofrecen dos configuraciones diferentes cuando se trata de realimentación de interruptores de límite.
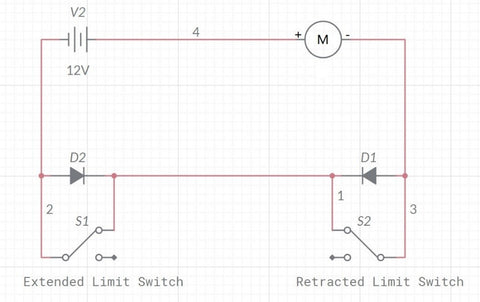
Opción 1:
Los 'Comunes' para ambas señales están separados. El interruptor de límite extendido y el interruptor de límite retraído proporcionarán una señal individual de normalmente abierto y cerrado a los usuarios. Luego, el sistema de control puede tomar esa señal para monitorear las posiciones y hacer que el motor se detenga en la posición completamente extendida y retraída.
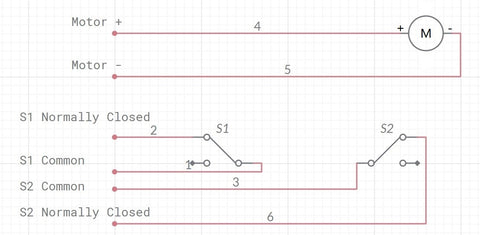
Opcion 2:
Muy similar a la opción 1, excepto que ahora el interruptor de límite extendido y retraído comparte una señal común. Esto seguirá proporcionando el mismo estado abierto y cerrado, pero con un cable menos involucrado.
Ambas configuraciones pueden proporcionar la señal necesaria para encender o apagar la luz indicadora y también notificar al usuario que la unidad ha alcanzado su posición final. Esta es una aplicación común para maquinaria de línea de ensamblaje, donde el operador generalmente está alejado del actuador y depende de los indicadores del panel de control para alertarlo sobre el estado de la operación. Esto también se puede utilizar como redundancia en un circuito de control, para brindar seguridad adicional al usuario.
La retroalimentación de los finales de carrera puede ayudar al usuario a estar más informado del estado de su aplicación. Esta es sólo una de las muchas formas en que un actuador lineal puede proporcionar información adicional necesaria para mejorar la funcionalidad de un sistema. Para obtener más información y otras opciones de comentarios, visite nuestro sitio web o contáctenos en sales@progressiveautomations.com .