




DC motors are widely used both in industrial applications and at home for personal projects. One of the key considerations when choosing to use a DC motor is whether to attach some form of feedback to the motor.
What is feedback?
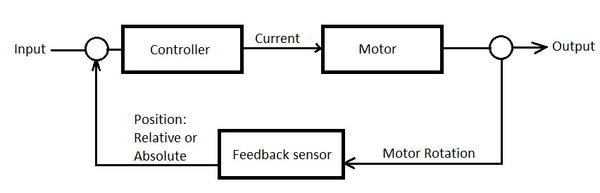
Feedback refers to any information that a controller can use to monitor a process. In DC motors, feedback is usually collected in the form of position, number of rotations, and direction of rotation. This information can then be passed to the controller to measure the angular speed and position of the motor shaft, this is commonly known as a form of “closed-loop control”.
In more sophisticated use cases, the feedback from the motor and other sources can be controlled to not only achieve precise speed and position, but also the desired dynamic response, synchronization, and stability.
Benefits of using feedback
When properly implemented, feedback can allow the machinery to operate more efficiently and with higher repeatability. Feedback could allow your mechanism to automatically adjust the output to maintain stability, reduce variations, and minimize errors without any need for human involvement.
A simple example of a good feedback control system is the thermostat. The controller measures the temperature in the room and adjusts the output of the heating elements to maintain a set temperature.
One of the key advantages of feedback when it comes to DC motors is PID control. PID refers to a control loop mechanism widely used in the industry to automatically compensate for errors in the speed or position of the machine.
Feedback can also be used to implement fail-safe mechanisms and troubleshoot your application. For example, if your linear actuators are supposed to move in sync but one is lagging, something is wrong. The system can then stop the movement of both actuators to prevent damage or tilting.
Types of feedback sensors for DC motors
The most common types of feedback for DC motors are potentiometers, hall effect sensors, and encoders. As far as precision and accuracy are concerned, all 3 types can be comparable and are very effective with modern technology. The differences come when considering specific performance requirements such as durability, environmental factors, electromagnetic interference, and temperature performance.
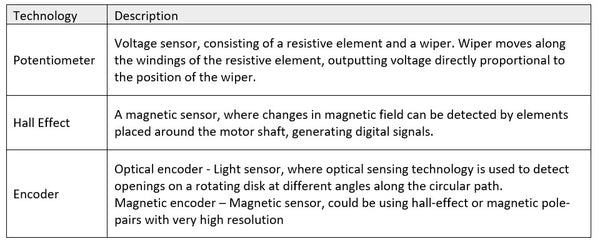
Potentiometer
The biggest advantage of this type of feedback is its simplicity. Potentiometer effectively turns a regular DC motor into a servo motor, allowing for precise movement and/or speed control. Potentiometers provide direct angular position information of the motor shaft. As a result, when the system loses power, the potentiometer can retain its positional information without the need to “home”. Furthermore, because potentiometers at the core are just voltage dividers with a large resistor, they are good at dealing with electromagnetic interference (EMI).
There are also drawbacks that come with using potentiometers. Potentiometer sensors require to contact to make the measurements, which means they would be less durable and have a limited useful life compared to other forms of feedback. Potentiometers are a relatively slow form of measurement, both because of the need for contact and because they may need an analog-to-digital converter before actual feedback control is established. Finally, potentiometers in motors create a limitation on the number of rotations that a shaft can make. The applications with potentiometers feedback would have to make sure there is a way to prevent overt traveling.
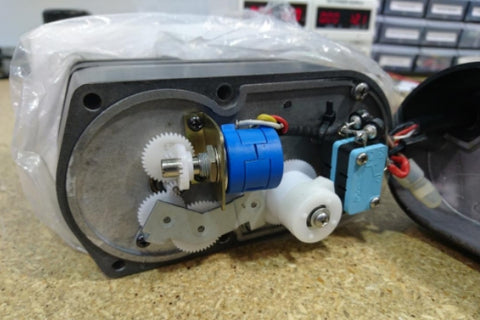
Hall Effect
Hall effect sensors are a staple of motor feedback because they are reliable, precise and have a long useful life. Unlike the potentiometer, the hall effect sensors don’t need to make any contact, so they are useful in harsh environments, highly resistant to wear and tear, and reliable in high shock environments. Hall effect sensors provide electrical pulses when the magnet is aligned with sensing electronics. For this reason, they are suitable for high-speed applications and allow to pre-program certain motor shaft angles.
One of the disadvantages of hall effect sensors is that they can only provide relative position information. This means that every time the system loses power, the hall effect sensors would have to be moved to a known location and reset. Furthermore, hall effect sensor wires carrying information could be vulnerable to electromagnetic interference and noise. For this reason, the signals can sometimes be lost, or false signals could be generated, which means that position information can “drift” over time.
Encoder
There are optical and magnetic encoders. Magnetic encoders are likely the best overall sensor for generating feedback signals. They are contactless, same as the Hall Effect sensors, which means they have a very high useful life. They are very fast and typically have very high resolution. Magnetic encoders are also not affected by dust or other particulates and can be used in a variety of environments.
The encoders are typically expensive and require dedicated electronics which can be hard to set up and control. Adding unnecessary complexity to the design is not always a good idea because it would also increase the number of potential failure modes.
There is a variety of forms of feedback available to designers and with advancements in modern technology, they can be made roughly equivalent in terms of accuracy. When choosing the type of feedback, one must consider the performance needs of their application and understand the benefits of technologies they are working with.