Puede haber casos en los que desee mover un objeto a una distancia mayor que la longitud de carrera del actuador. Puede lograr esto utilizando un actuador telescópico o puede utilizar la física del apalancamiento mecánico a su favor. Ejemplos comunes de esto son el elevador de tijera o lo que hizo nuestro amigo Mike Senna, el creador del robot Wall-E , con su abridor automático de puerta DIY Chicken Coop.
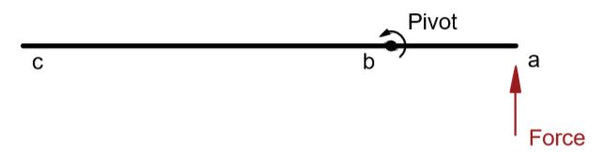
La física detrás de estas aplicaciones utiliza una relación de distancias desde el punto de pivote en cada lado. Como puede ver en la Figura 1, el actuador está montado en el punto a con un pivote fijo en el punto b. Al tomar la proporción de B y A, se obtiene una proporción de . Esto significa que el punto c girará R veces más que la carrera del actuador. Sin embargo, esto aumentará la cantidad de fuerza requerida por el actuador y la velocidad de rotación del punto c en R veces.
Figura 1: Miembro que gira alrededor de un punto de pivote
Abridor de puerta automático para gallinero de bricolaje
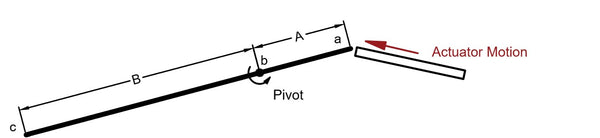
La aplicación de Mike Senna utiliza el mismo principio discutido anteriormente y también proporciona un excelente ejemplo de cómo agregar otro miembro para convertir la rotación del punto c nuevamente en un movimiento lineal. Puede ver en la figura 2 que el miembro superior gira alrededor del punto de pivote y el actuador empuja en el punto a.
Figura 2: Miembro superior que gira alrededor de un pivote en el punto b
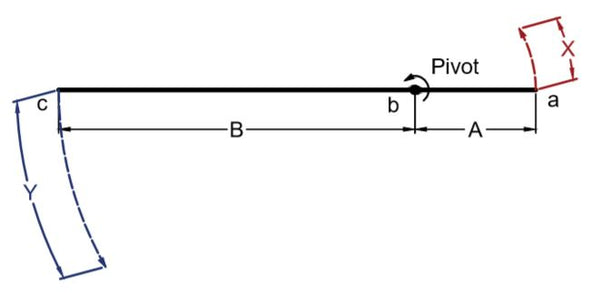
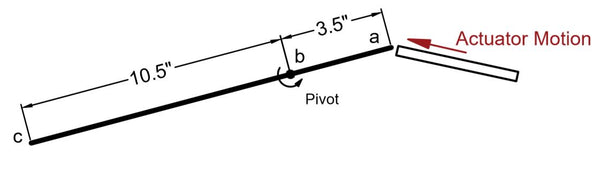
Mike sabía que necesitaba que la puerta del gallinero se abriera aproximadamente 18 pulgadas. “Lo primero a considerar es la relación de los movimientos”. Para hacer que la relación R sea igual a tres para asegurar que el punto c recorra 18” con un recorrido de 6”, colocó el punto de pivote ¾ hacia el punto a (figura 3). Mike hizo esto colocando el brazo de modo que "3,5 [pulgadas] estuvieran en un lado del punto de pivote y 10,5 [pulgadas] (3,5" x 3) en el otro lado".
Figura 3: Miembro superior que gira alrededor de un pivote en el punto b con dimensión
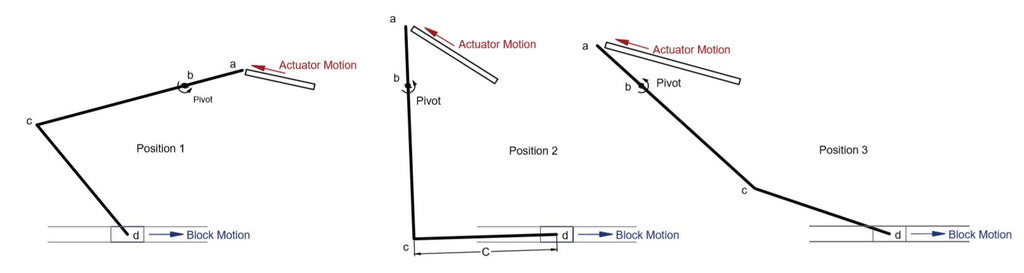
Después de esto, Mike añadió otro miembro para transformar el movimiento de rotación en lineal. Explica: "Mi solución fue agregar otro brazo cuyo propósito es ajustarse al arco cuando un extremo se mueve en un arco y el otro extremo se ajusta a un movimiento lineal". La Figura 4 es un diagrama realizado para su proyecto de abridor de puerta automático para gallinero de bricolaje que se muestra en varias posiciones diferentes a lo largo de su recorrido. Tenga en cuenta que la velocidad de la puerta del gallinero y la fuerza aplicada por el actuador cambiarán a lo largo del recorrido. Ahora era cuestión de ajustar la posición para lograr el recorrido de la puerta que deseaba.
Figura 4: Puerta del gallinero en tres posiciones diferentes
El elevador de tijera
El elevador de tijera es otra aplicación que utiliza este principio para lograr un movimiento más lineal con apalancamiento mecánico. Para proporcionar un ejemplo, se creó un modelo 3D para simular un actuador con un actuador relativamente corto que se eleva más que la carrera del actuador.
Figura 5: Modelo 3D de un elevador de tijera de una sola etapa
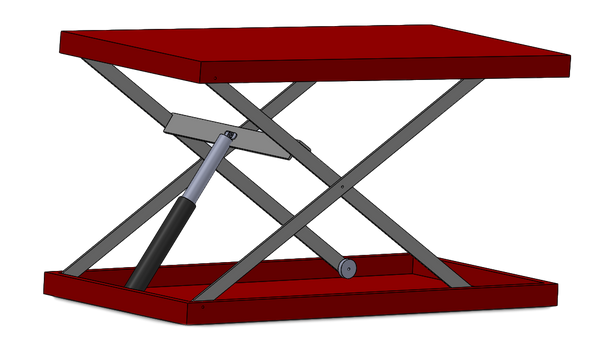
Como puede ver en la Figura 5, se utilizó un actuador con una carrera relativamente corta (8 pulgadas en este caso) para levantar 36 pulgadas. Los elevadores de tijera funcionan con el mismo principio: un cuerpo gira alrededor de un punto de pivote y se crea una ventaja mecánica. Sin embargo, en lugar de agregar otro miembro cuyo propósito es simplemente trasladar el movimiento de rotación de un extremo a traslación, el movimiento de los extremos de los miembros se restringe a una dirección horizontal. Esto da como resultado que la dirección de la fuerza sea sólo hacia arriba.
Lo interesante del elevador de tijera es que si el actuador se monta en la mitad superior, el elevador se elevará a medida que el actuador se extienda. Sin embargo, monte el actuador en la mitad inferior y el elevador se elevará a medida que el actuador se retraiga. También tenga en cuenta que cuanto más cerca esté montado el actuador de la unión media de los miembros, más se elevará el elevador, pero requerirá más fuerza.